Peiliang Li
栗培梁
Peiliang Li
栗培梁
About
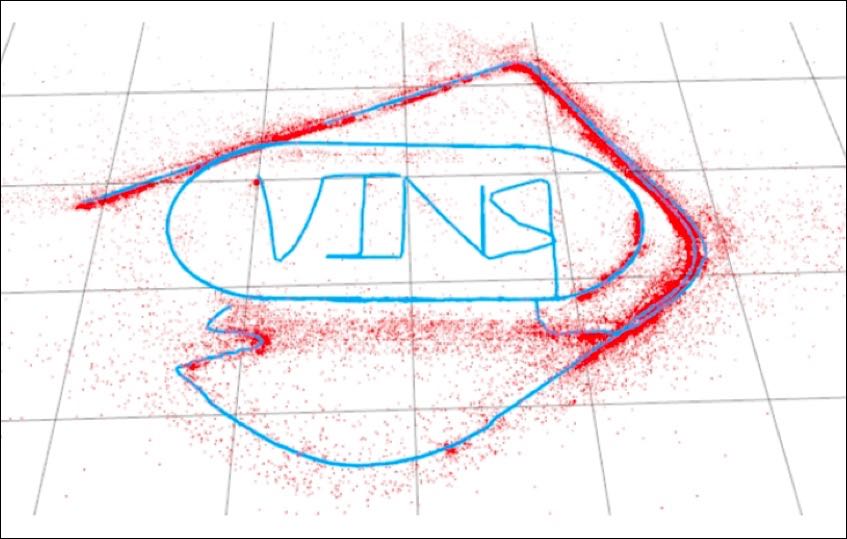
I am Peiliang Li, a forth-year Ph.D student in HKUST UAV Group at the Robotics Institute of Hong Kong University of Science and Technology supervised by Prof. Shaojie Shen. During my first Ph.D year, I mainly focus on visual inertial
state estimation (VINS-Mono, VINS-Mobile) and its application (UAV navigation, Augmented Reality). After that I employ
the 3D geometry methods inspired from VINS to solve the 3D object detection and tracking problem. I was an intern in Apple AI research team during 2019 summer, worked with Oncel Tuzel, and in DJI, during 2018 summer, worked with Xiaozhi Chen and Cong Zhao. I received my B.Eng. degree in electrical science and technology from USTC.
I'm interested in 3D Computer Vision, visual inertial fusion, and Machine Learning with particularly looking for their combination to solve the 3D objects detection, tracking and ego-motion estimation for autonomous driving.
Contact: peiliang.uav at gmail dot com;
[Scholar] [CV] [github]
Publications
Peiliang Li, Tong Qin, Shaojie Shen
European Conference on Computer Vision (ECCV 2018)
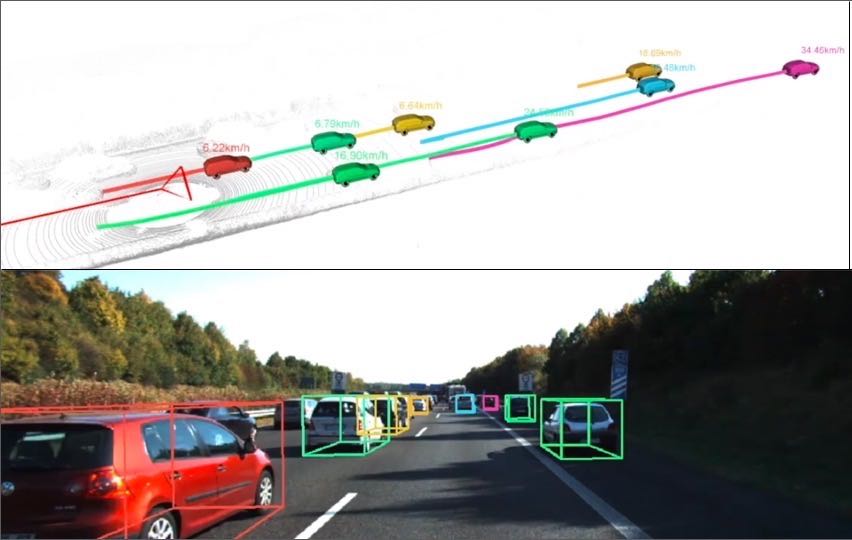
Stereo Vision-based Semantic 3D Object and Ego-motion Tracking for Autonomous Driving
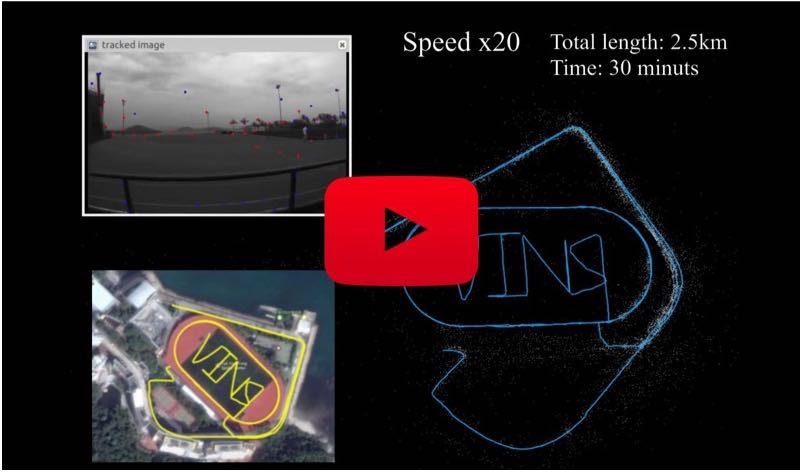
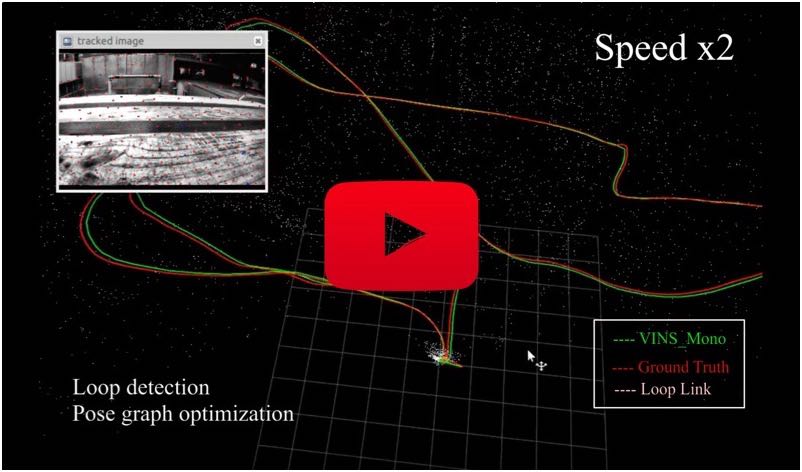
VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator
Tong Qin, Peiliang Li, Shaojie Shen
IEEE Transactions on Robotics (TRO 2018 Best Paper Honorable Mention)
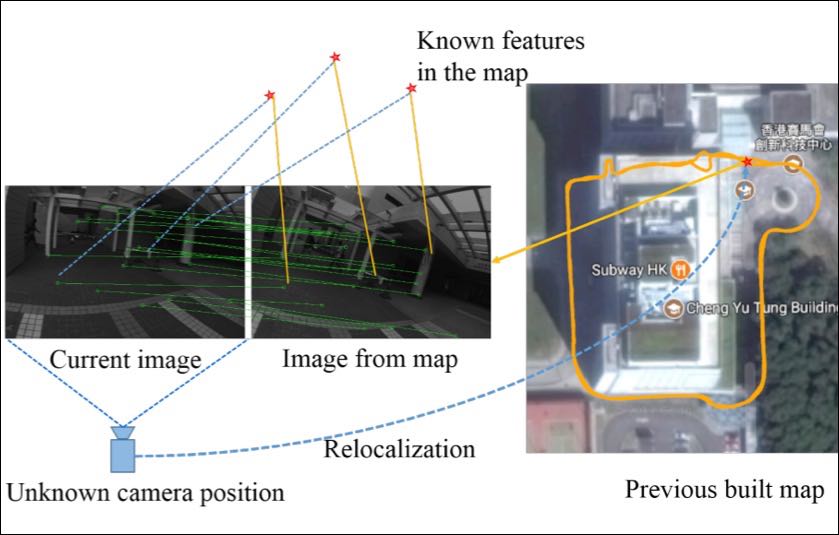
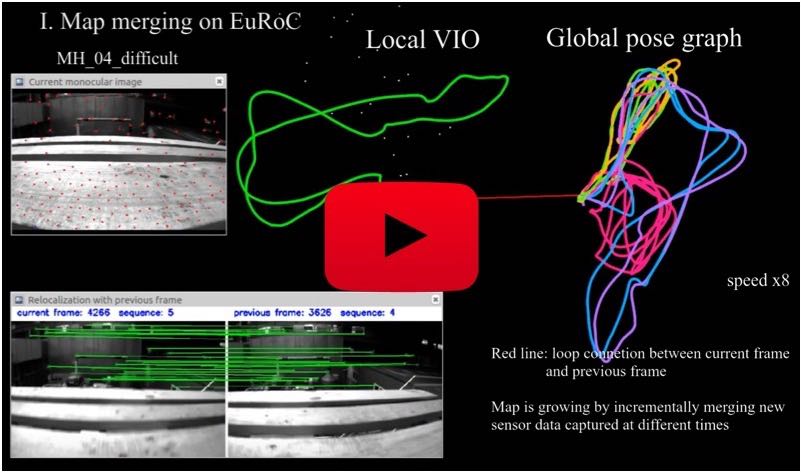
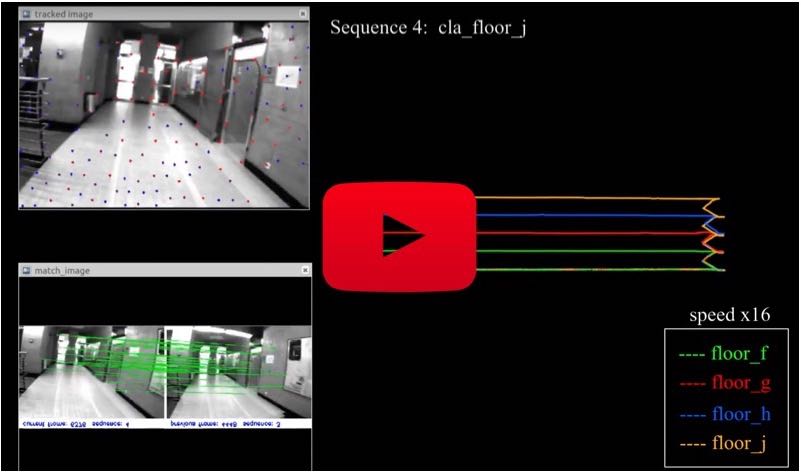
Relocalization, Global Optimization, and Map Merging for Monocular Visual-Inertial SLAM
Tong Qin, Peiliang Li,Shaojie Shen
International Conference on Robotics and Automation (ICRA 2018)
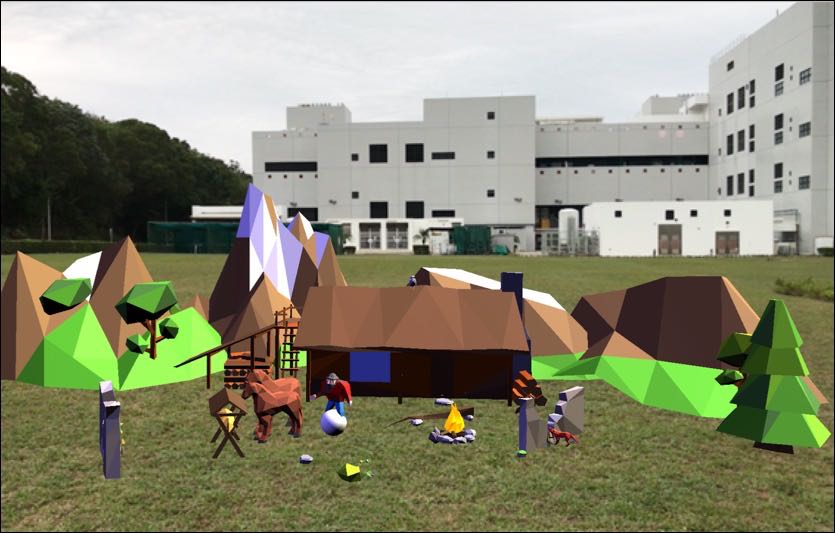
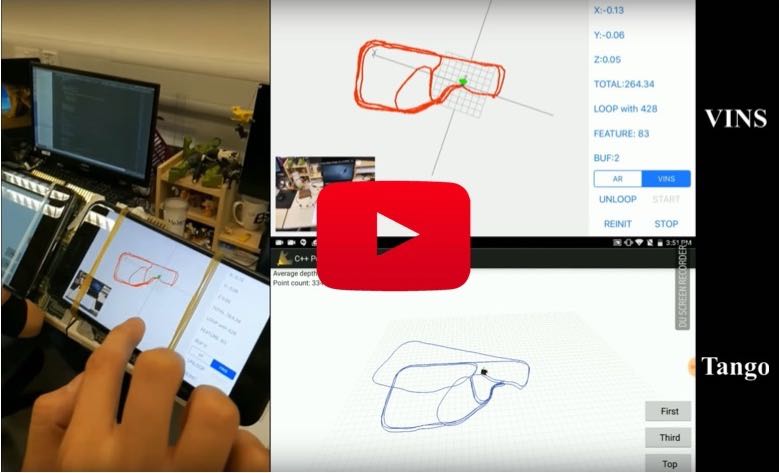
Monocular Visual-Inertial State Estimation for Mobile Augmented Reality
Peiliang Li, Tong Qin, Botao Hu, Fengyuan Zhu, Shaojie Shen
International Symposium on Mixed and Augmented Reality (ISMAR 2017)




Code
Code
Code
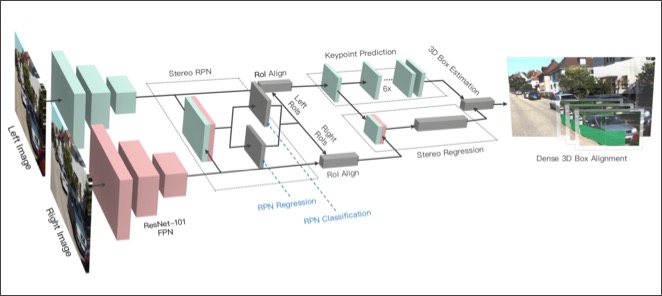
Peiliang Li, Xiaozhi Chen, Shaojie Shen
IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2019)
Stereo R-CNN based 3D Object Detection for Autonomous Driving
News
• [Feb 2019] One paper accepted by CVPR 2019.
• [Jan 2019] I will intern at Apple AI research team during 2019 summer.
• [Apr 2019] Our journal paper VINS-Mono received the Honorable Mention for the 2018 IEEE T-RO Best Paper award!
• [Apr 2019] The code of Stereo R-CNN is released here!
Code
Multi-Sensor 3D Object Box Refinement for Autonomous Driving
Peiliang Li, Siqi Liu, Shaojie Shen
Arxiv 2019 Results on KITTI val:
Mono
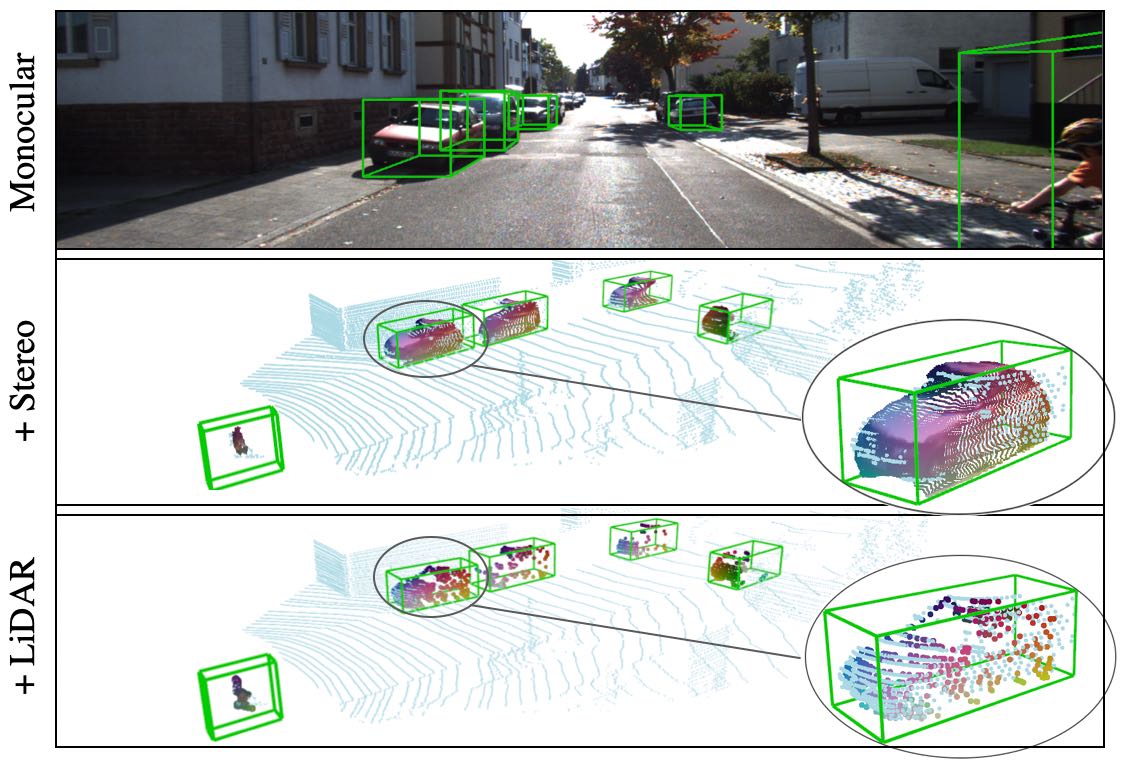
Stereo
LiDAR

• [Feb 2020] One paper about 3D object tracking is accepted by CVPR 2020.